Обновление колесной базы
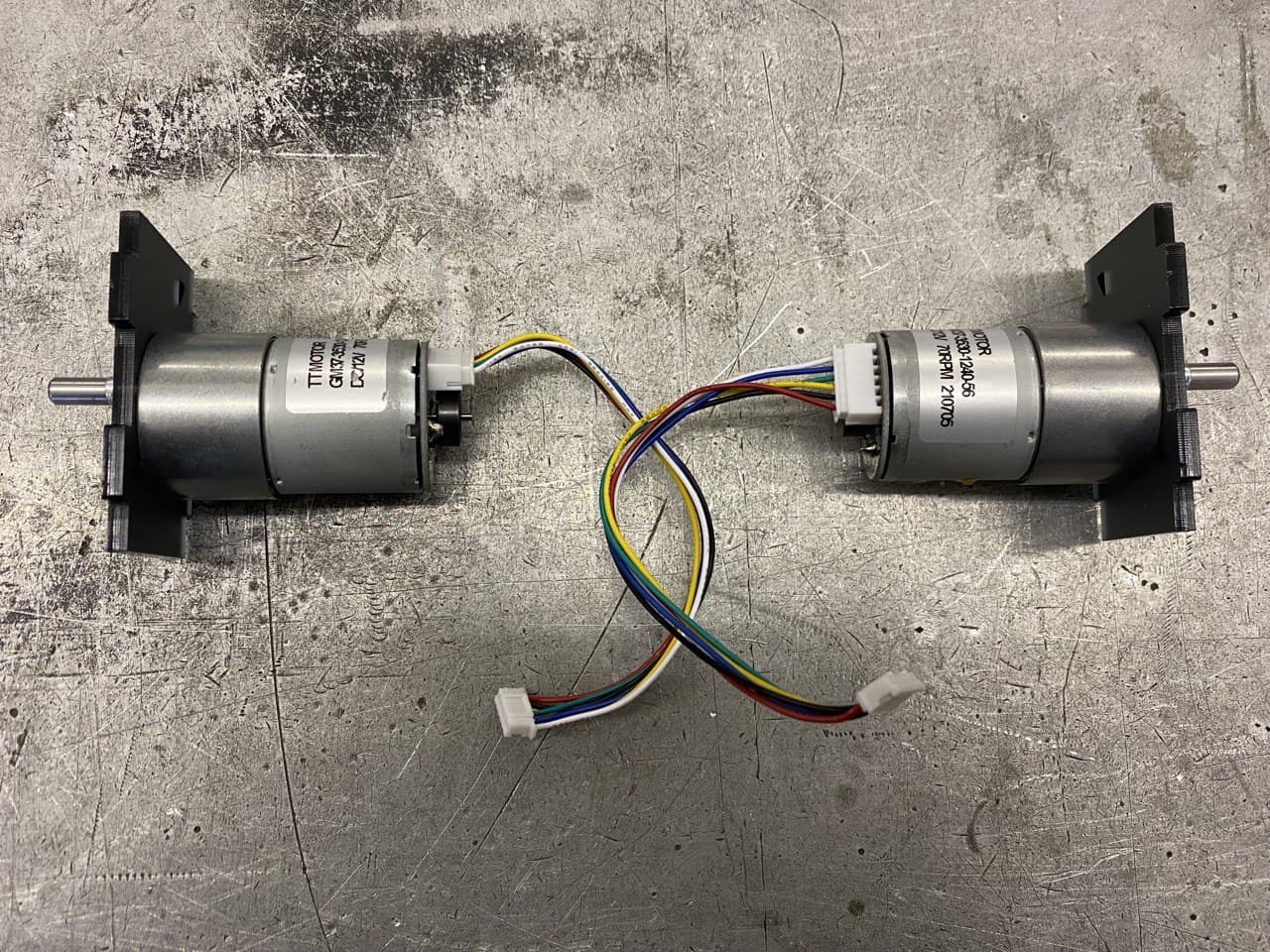
В рамках обновления робота TurtleBro были подобраны новые моторы с энкодерами, которые отличаются большей надежностью по сравнению с моторами старого образца и имеют улучшенные характеристики.

Слева - мотор старого образца; справа - мотор нового образца
В связи с увеличением типоразмера новых моторов необходимо пересобрать колесную базу робота.
Разбор колесной базы со старыми моторами
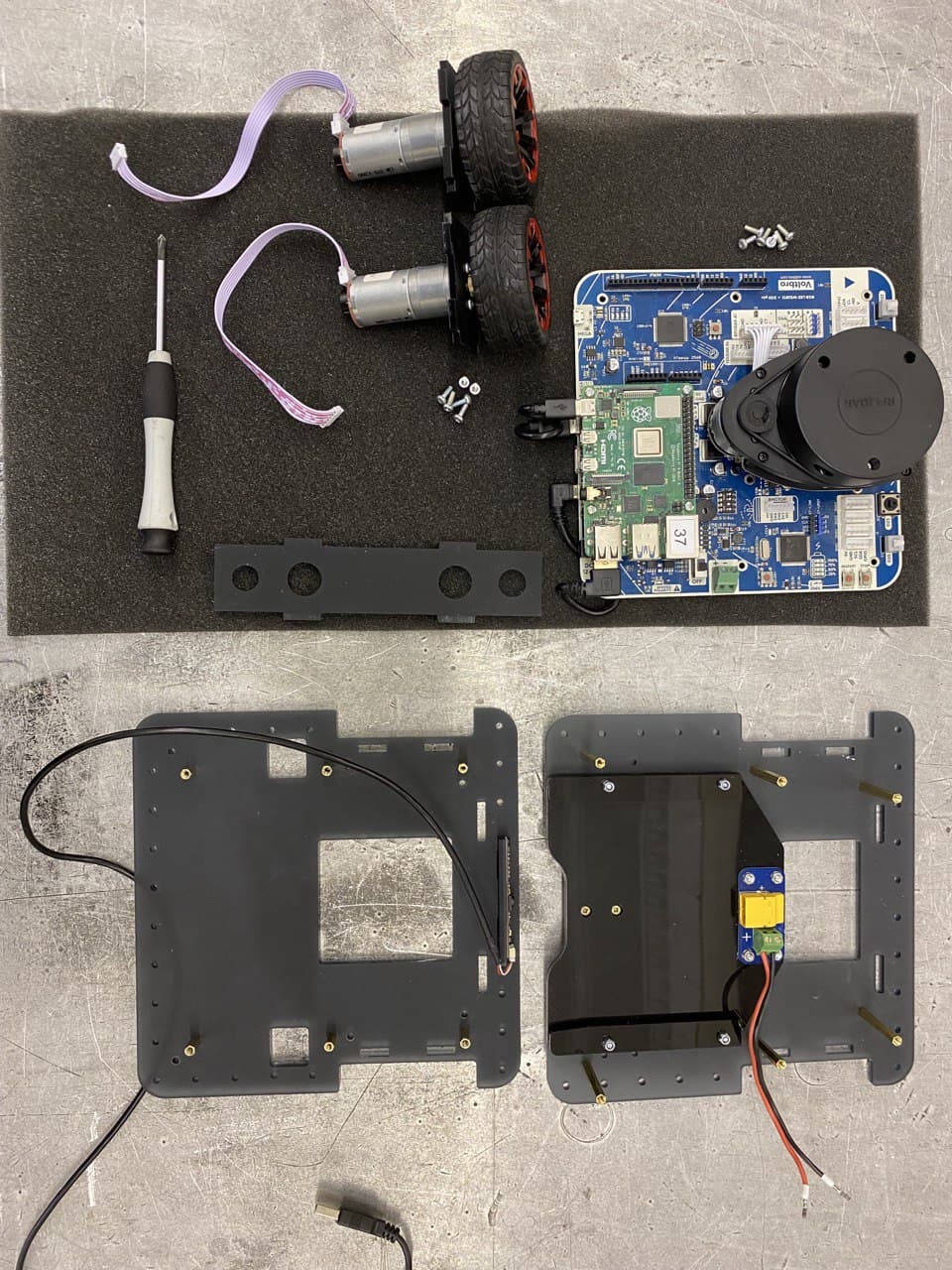
Для разбора колесной базы со старыми моторами необходимо:
- Отключить робота от питания, вытащить аккумуляторную батарею
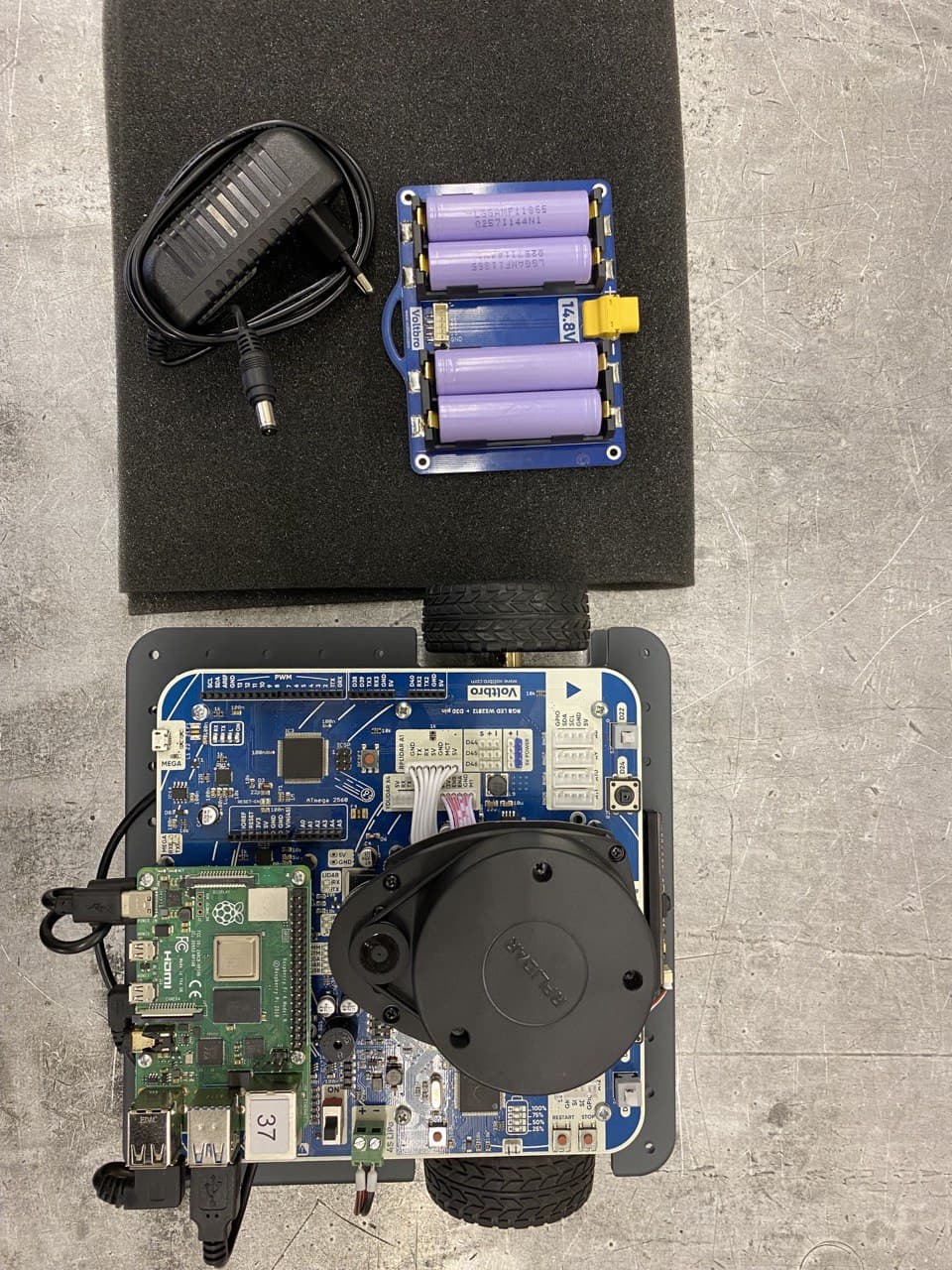
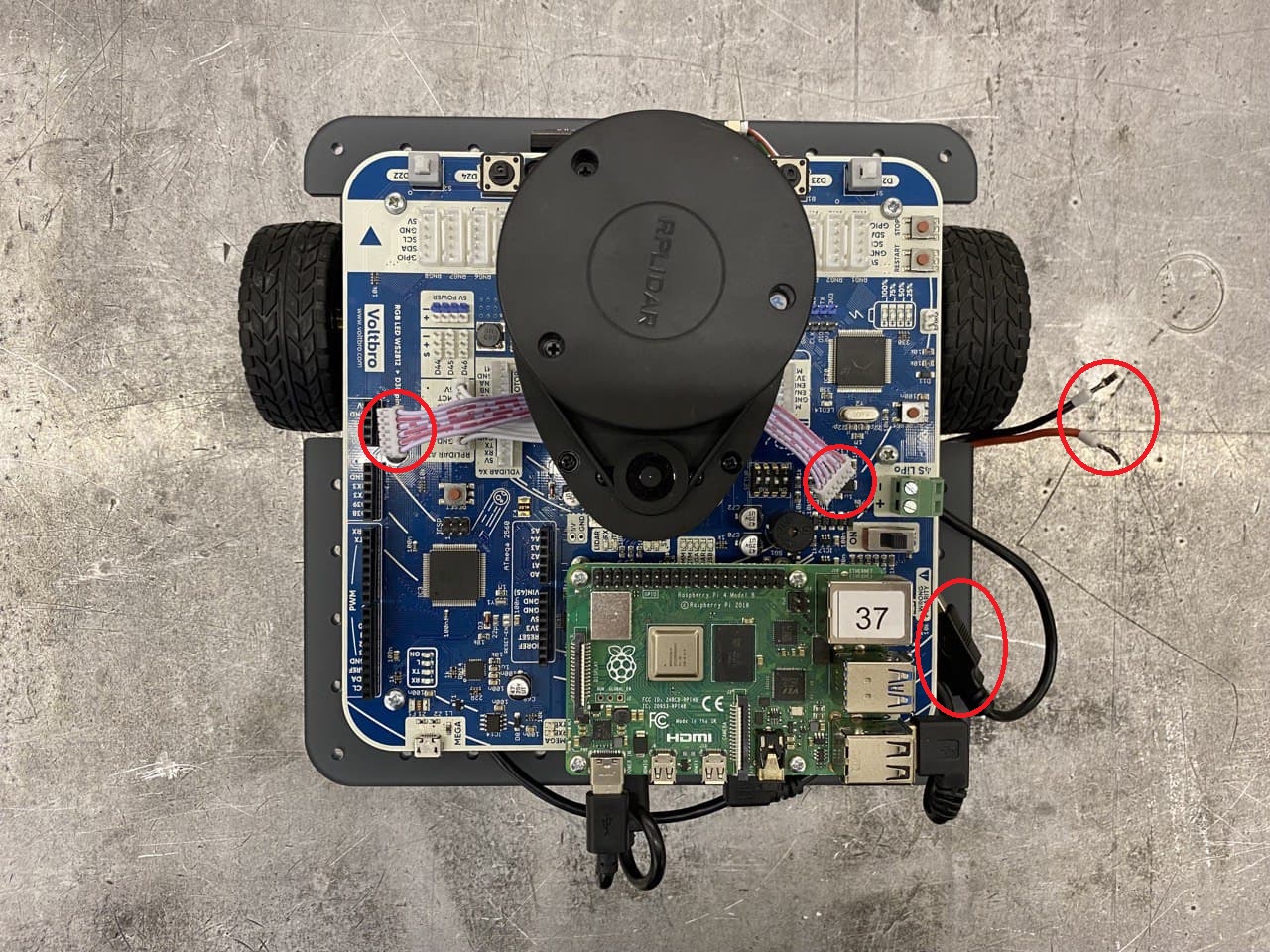
- Отключить кабели моторов и провода питания от платы TurtleBoard, а также usb-кабель подключения камеры от Rasberry Pi
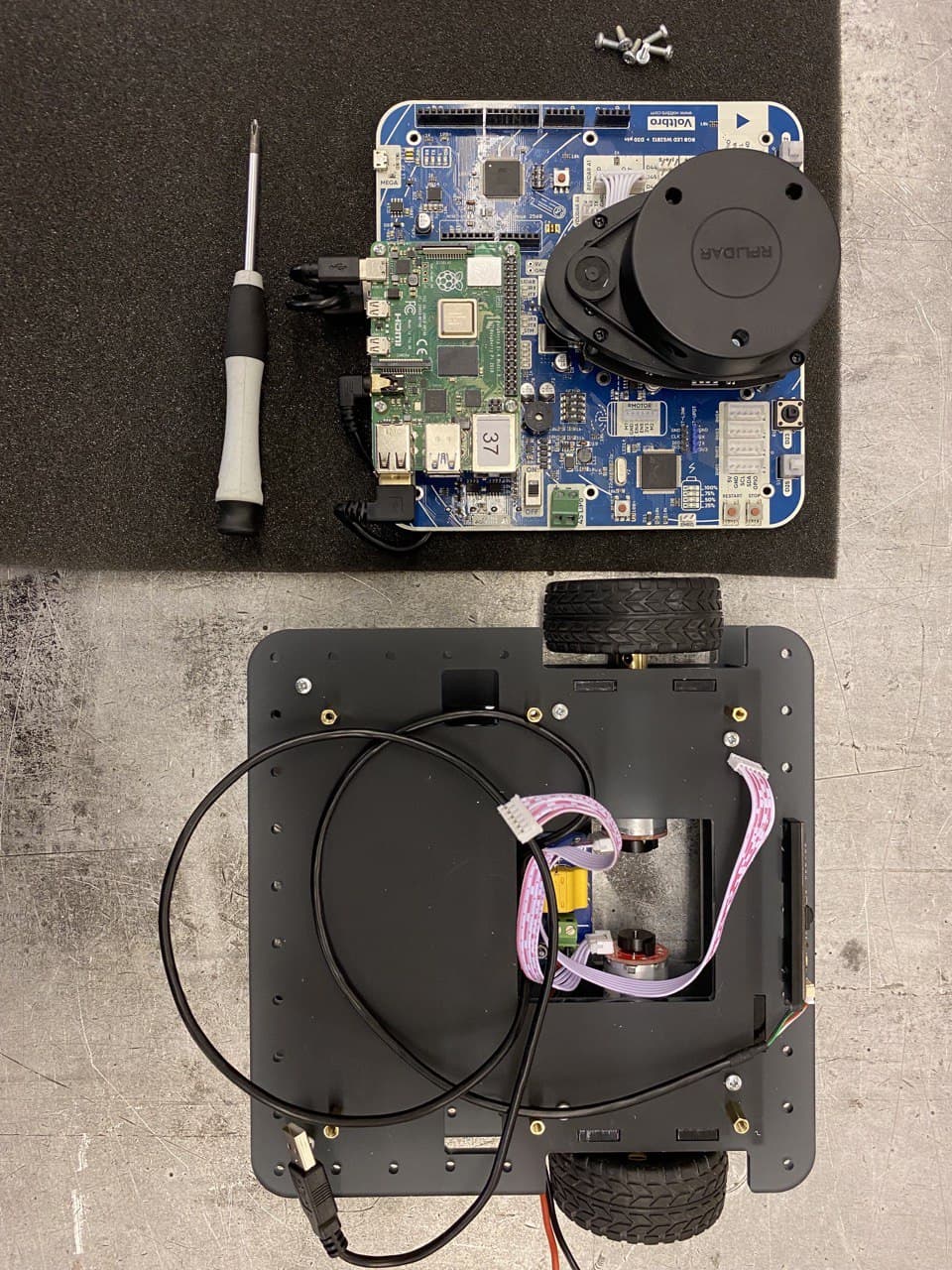
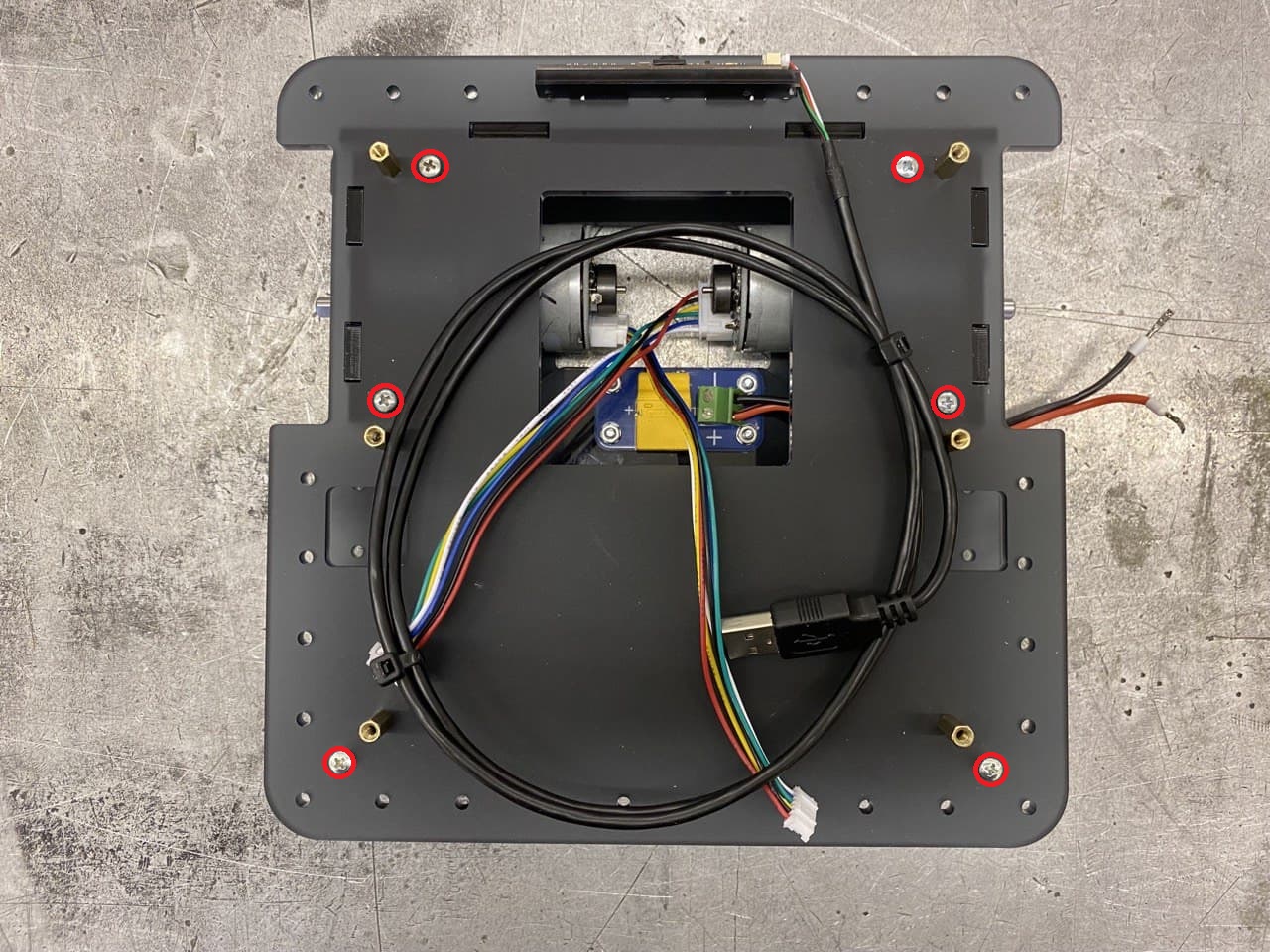
- Используя крестовую отвёртку открутить 6 винтов М3х8 c верхней части робота и снять плату TurtleBoard

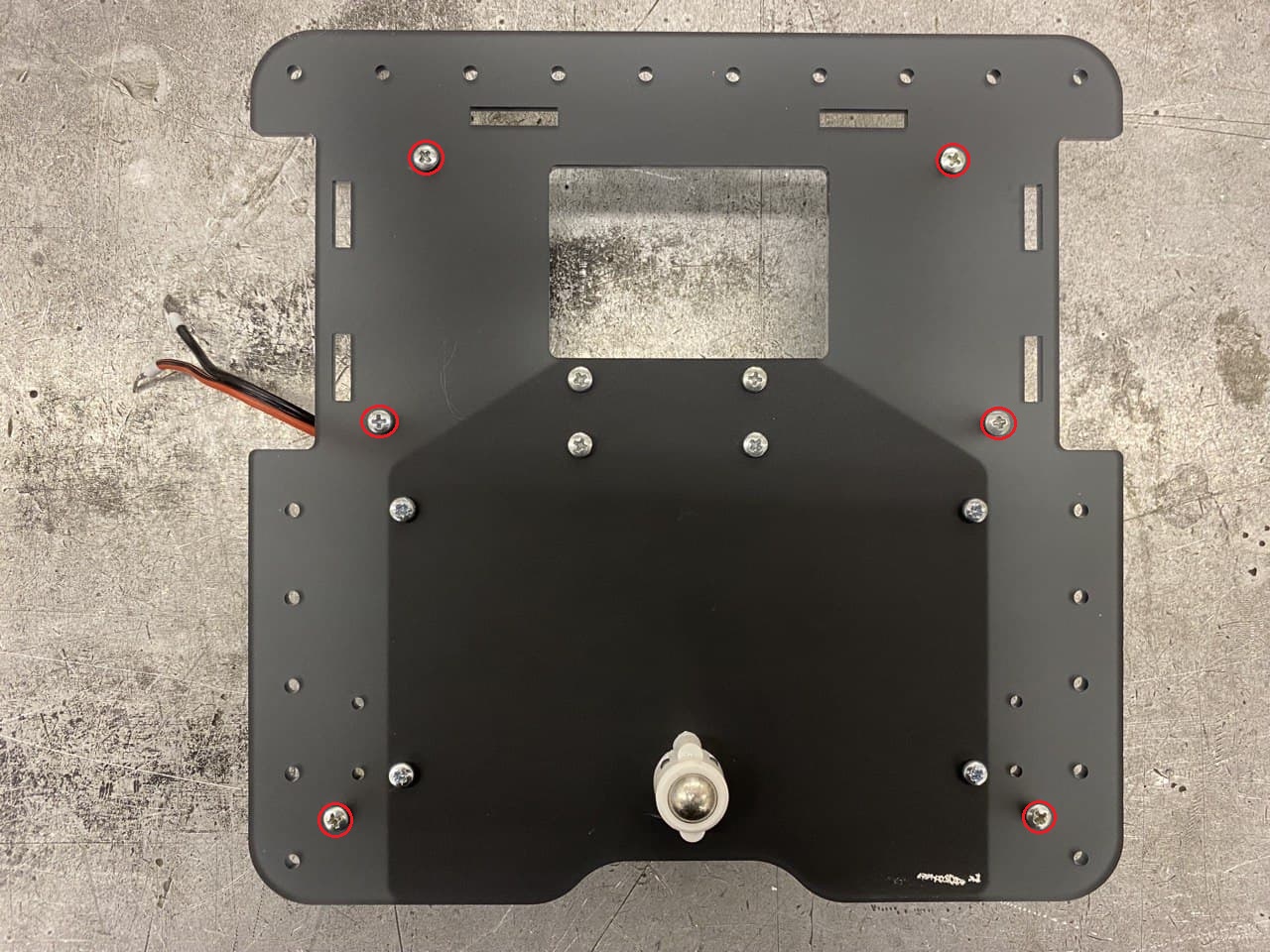
- Используя крестовую отвёртку открутить 6 винтов М3х8 с верхней части основания колесной базы
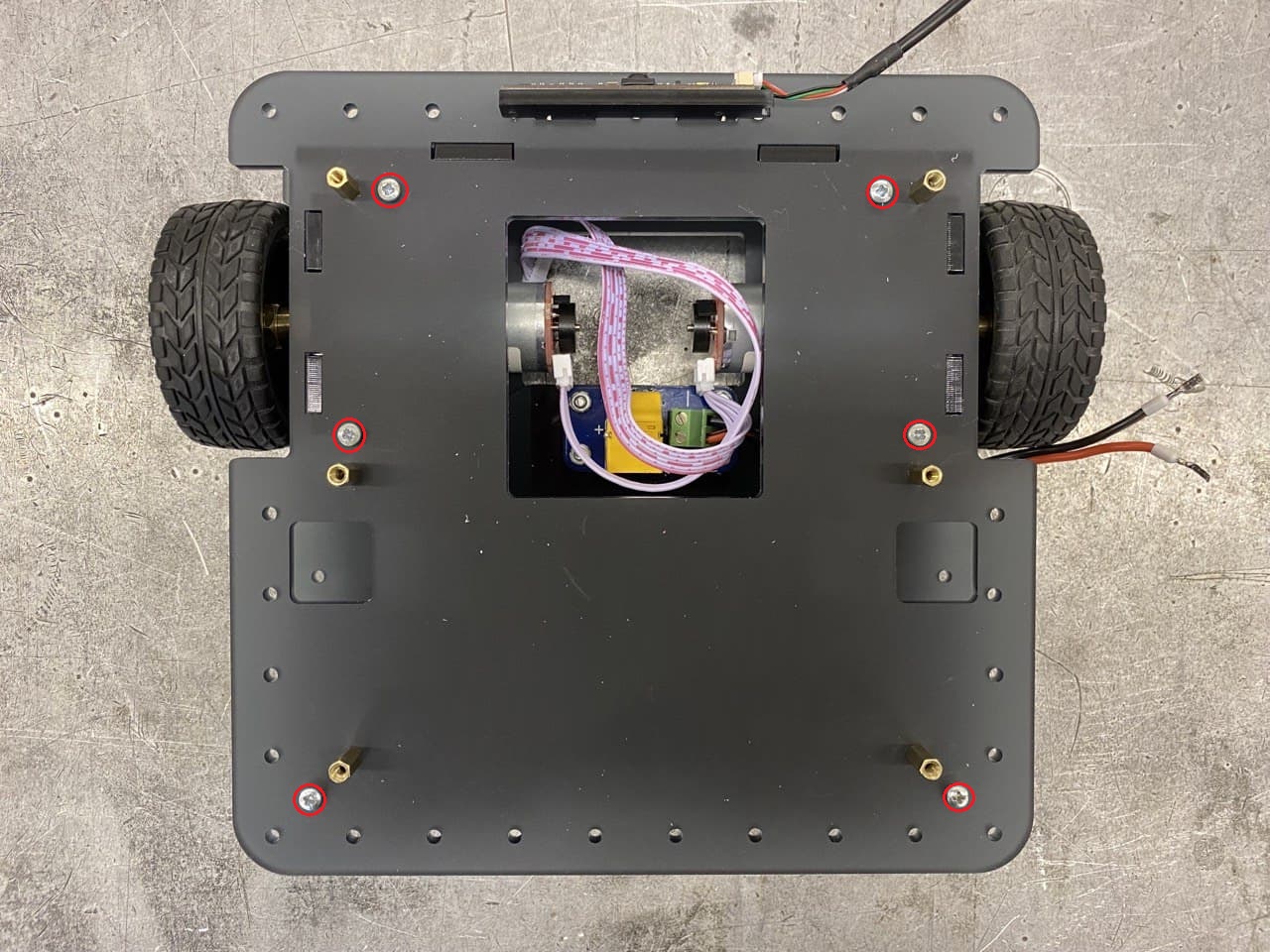
- Отсоединить кронштейны крепления моторов и переднюю панель от нижней части колесной базы
- Используя крестовую отвёртку открутить 6 винтов М3х8 c нижней части колесной базы и снять 6 монтажных стоек М3х35
Сборка колесной базы с новыми моторами
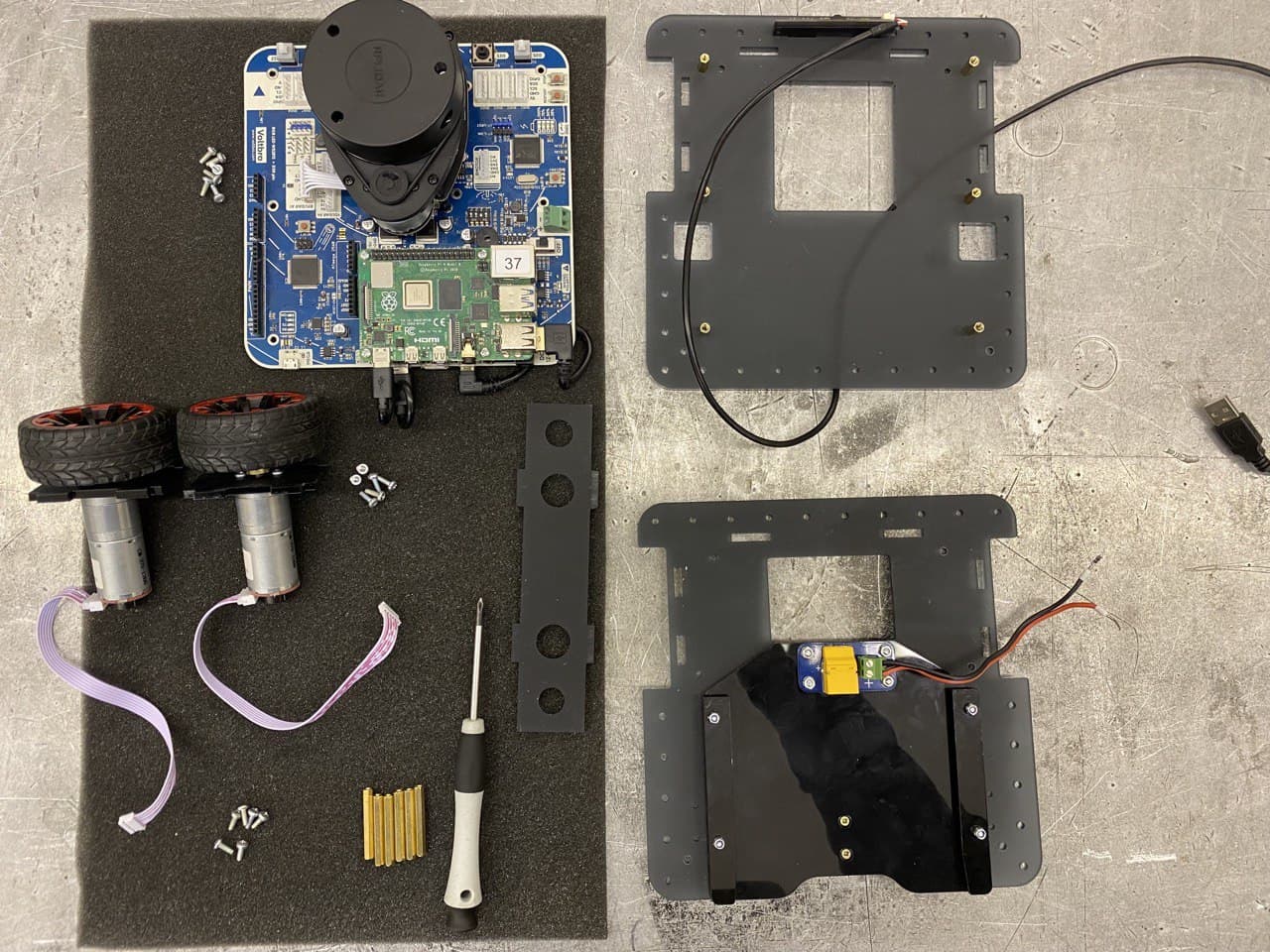
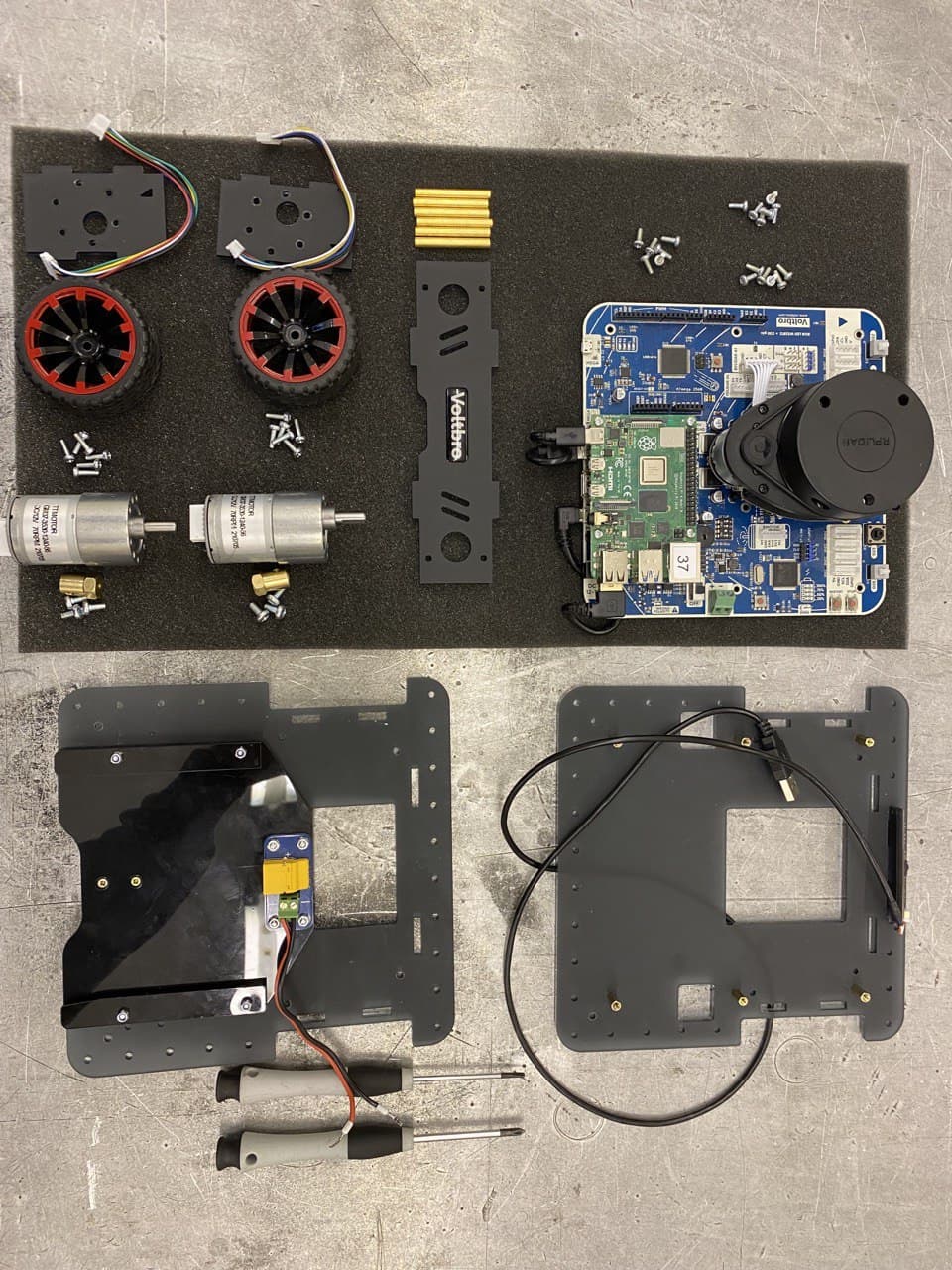
Используемые элементы:
- Мотор - 2 шт.;
- Кабель подключения мотора к плате TurtleBoard - 2 шт.;
- Боковые кронштейны для крепления мотора - 2 шт.;
- Передний кронштейн - 1 шт.;
- Монтажные стойки М3х40 - 6 шт.;
- Винты М3х8 - 18 шт.;
- Винты М3х10 - 12 шт.;
- Винты М4х8 - 6 шт.;
- Муфты для крепления колес, диаметр вала 6 мм. - 2 шт.;
- Колесо - 2 шт.;
- Крестовая отвертка - 1 шт.;
- Шлицовая отвертка - 1 шт.
Для сбора колесной базы с новыми моторами необходимо:
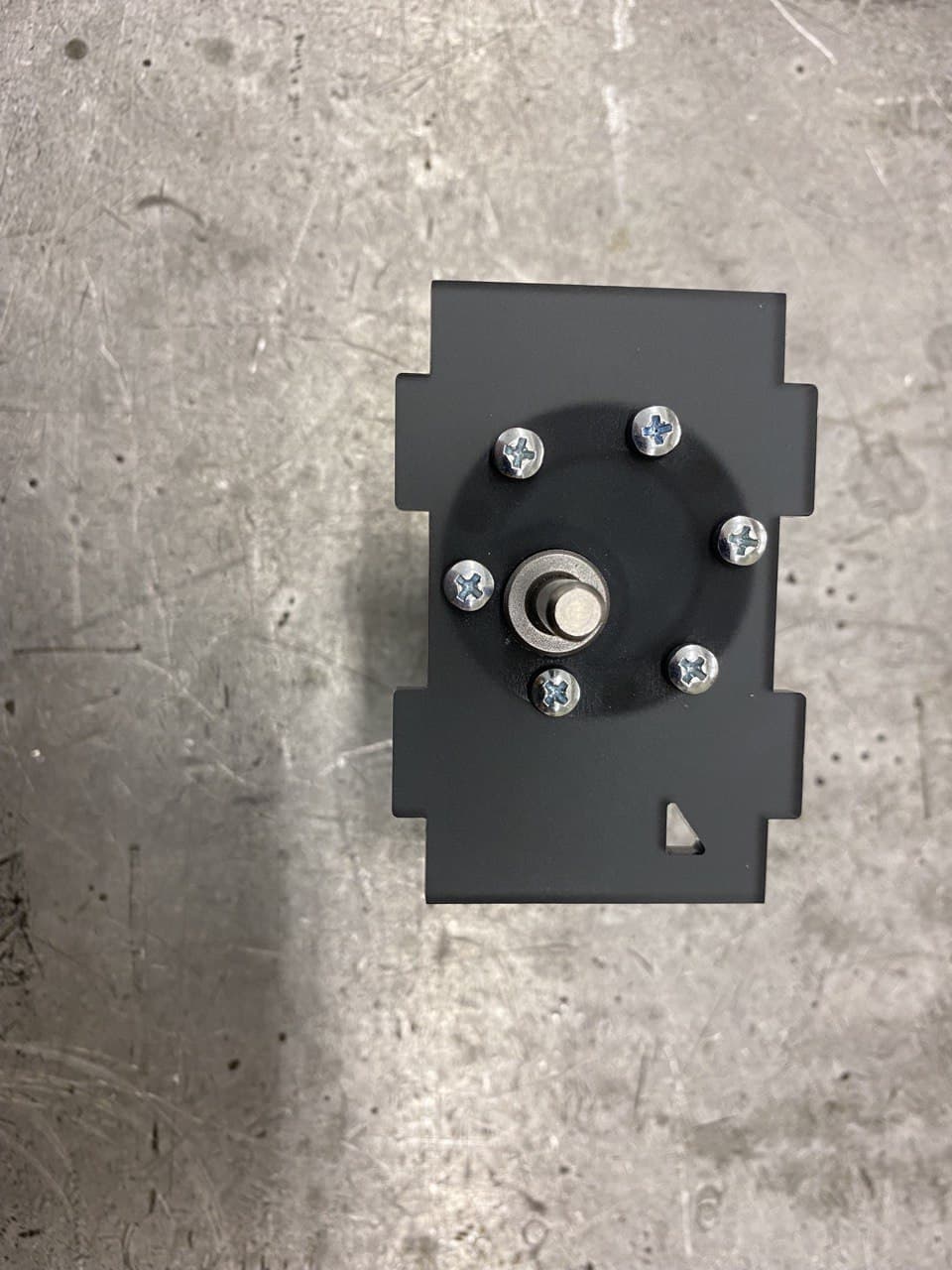
- Собрать кронштейн для крепления мотора с левой стороны робота, используя 6 винтов М3х10, в соответствии с рисунком:
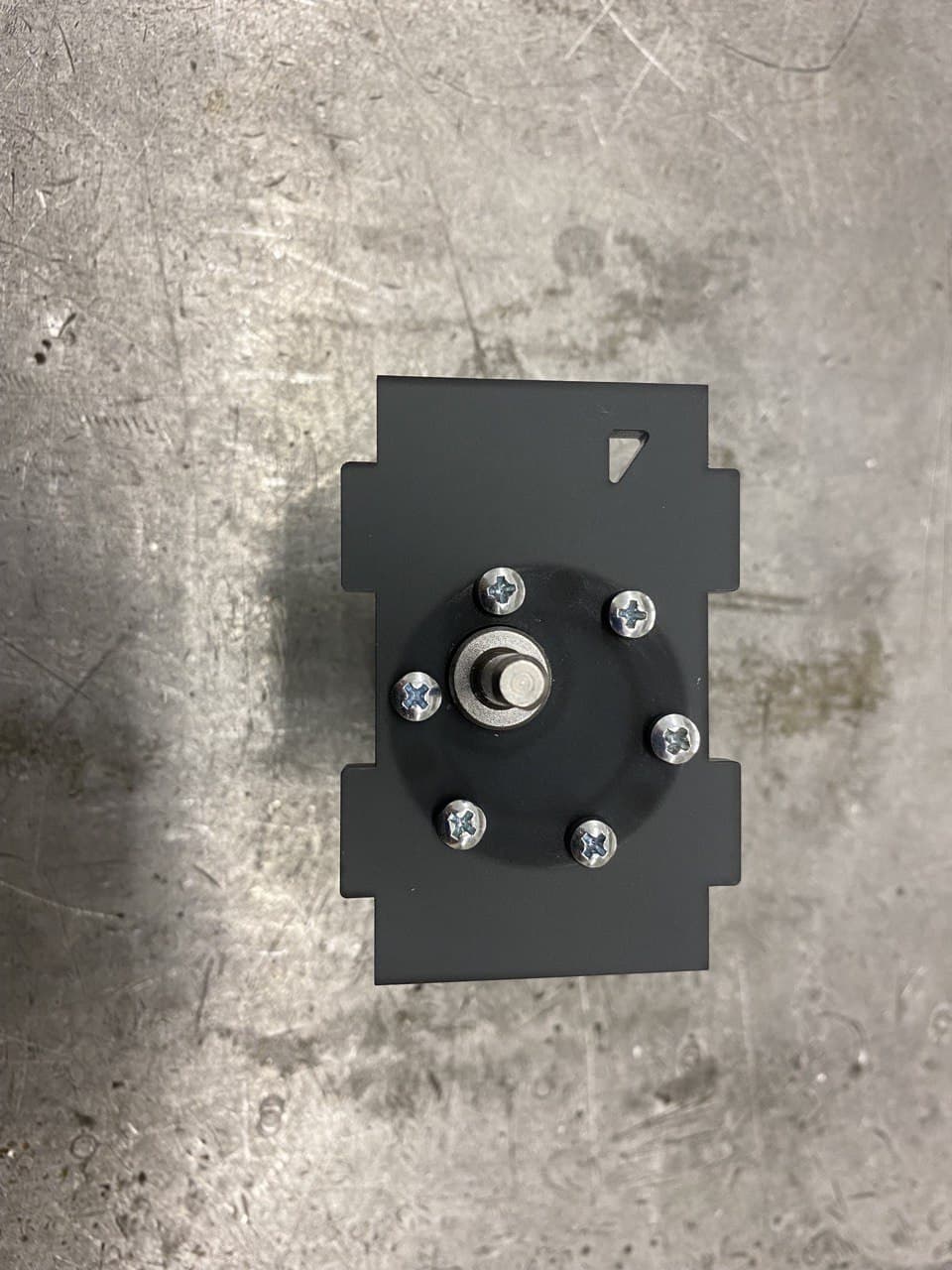
- Собрать кронштейн для крепления мотора с правой стороны робота, используя 6 винтов М3х10, в соответствии с рисунком:
- К нижней части колесной базы прикрутить 6 монтажных стоек М3х40 используя 6 винтов М3х8
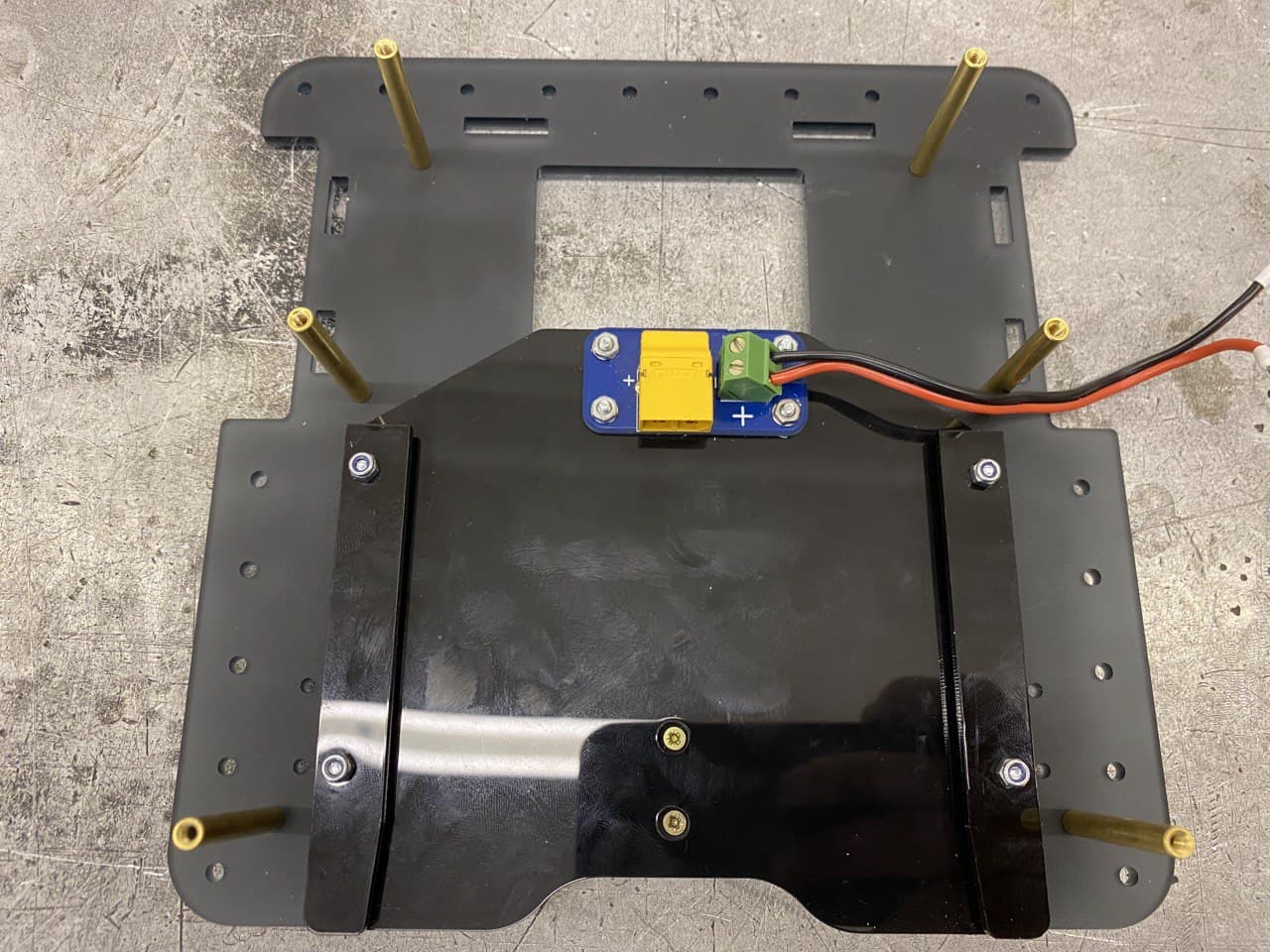
Присоединить к мотору кабель подключения. Учтите, что кабель имеет два разных типа коннекторов:
6-ти пиновый с шагом 2 мм - для подключения к плате TurtleBoard
- 6-ти пиновый с шагом 2.5 мм - для подключения к мотору
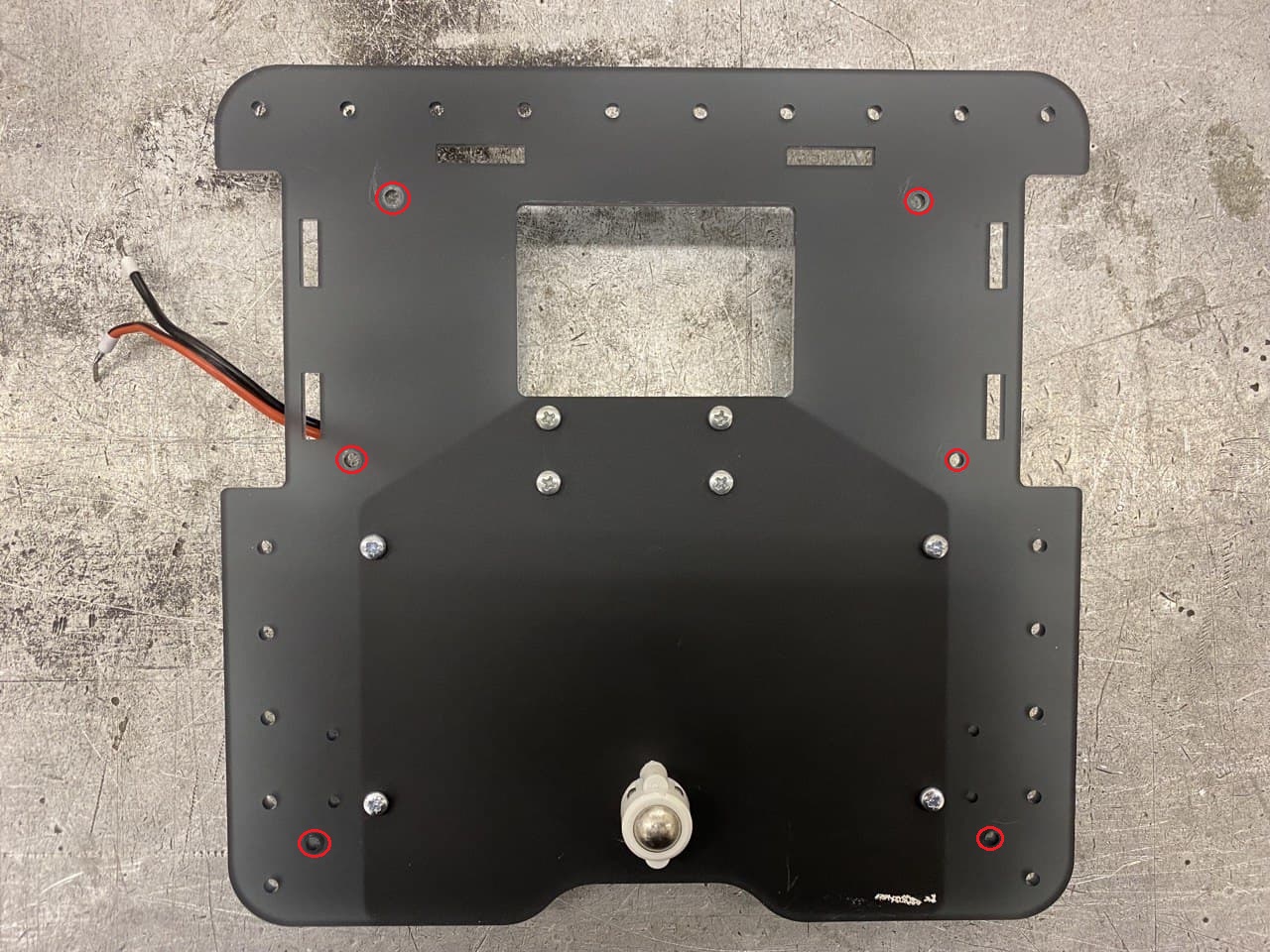
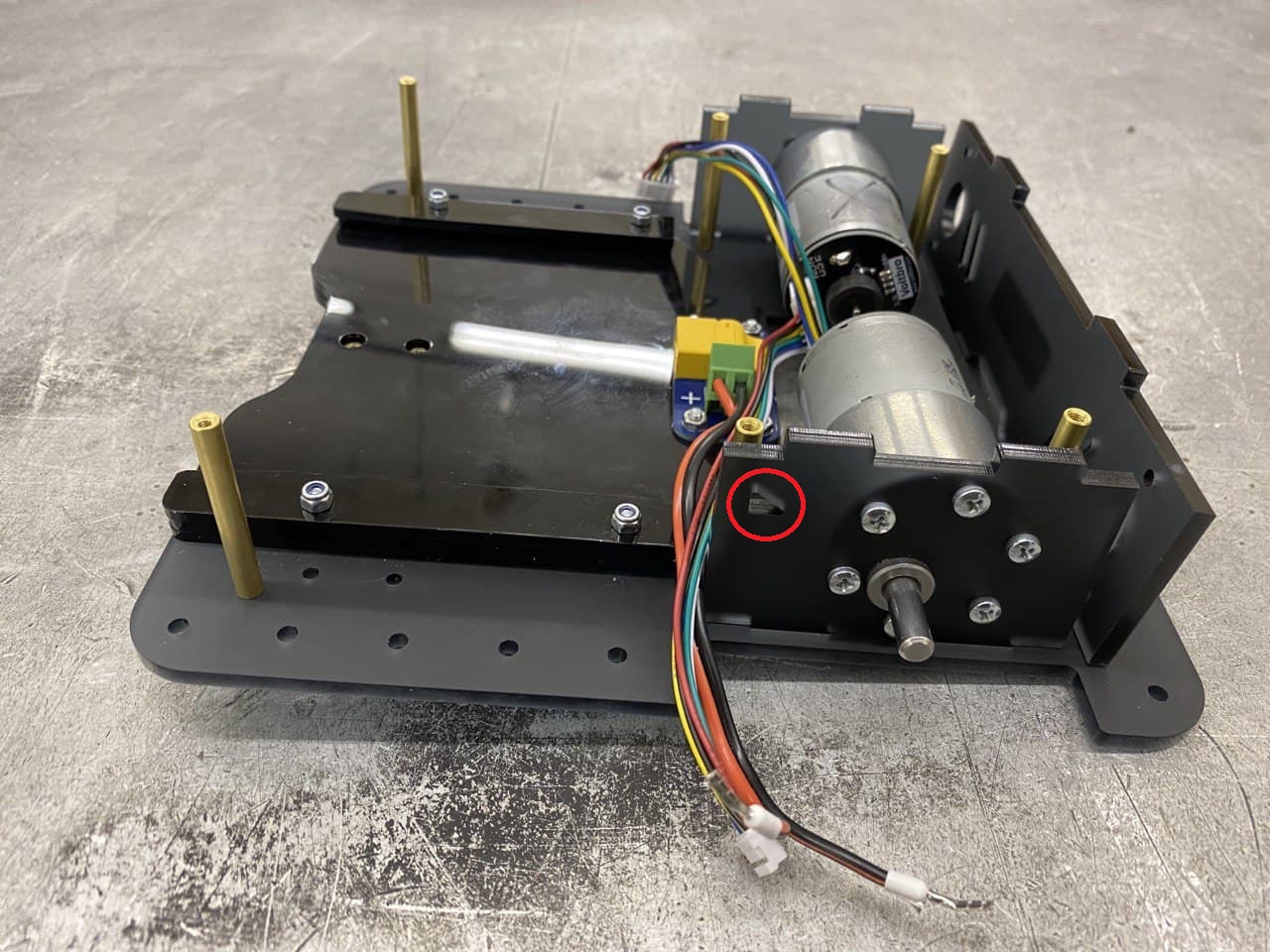
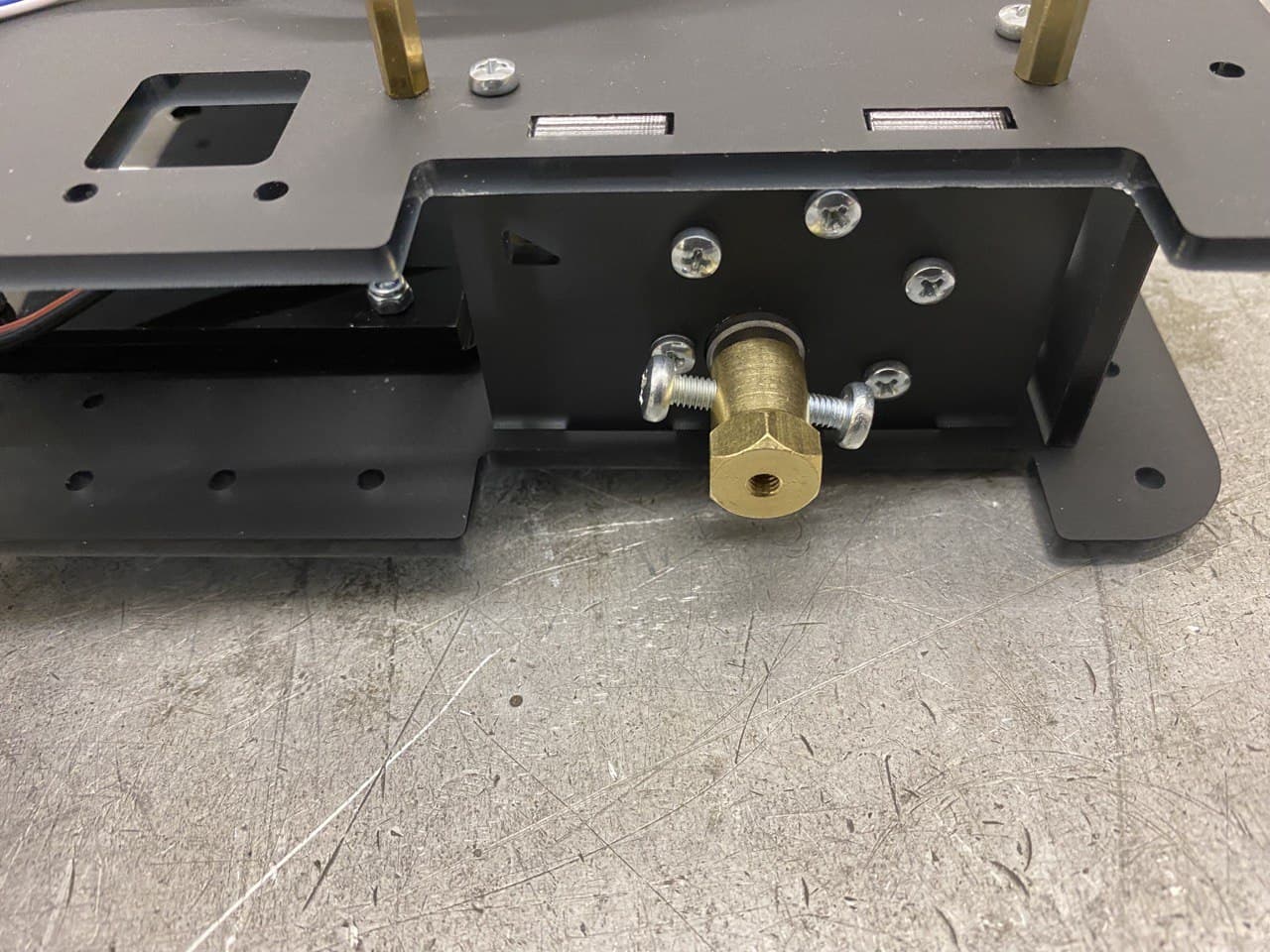
- Установить на нижнюю часть колесной базы кронштейны крепления моторов и переднюю панель
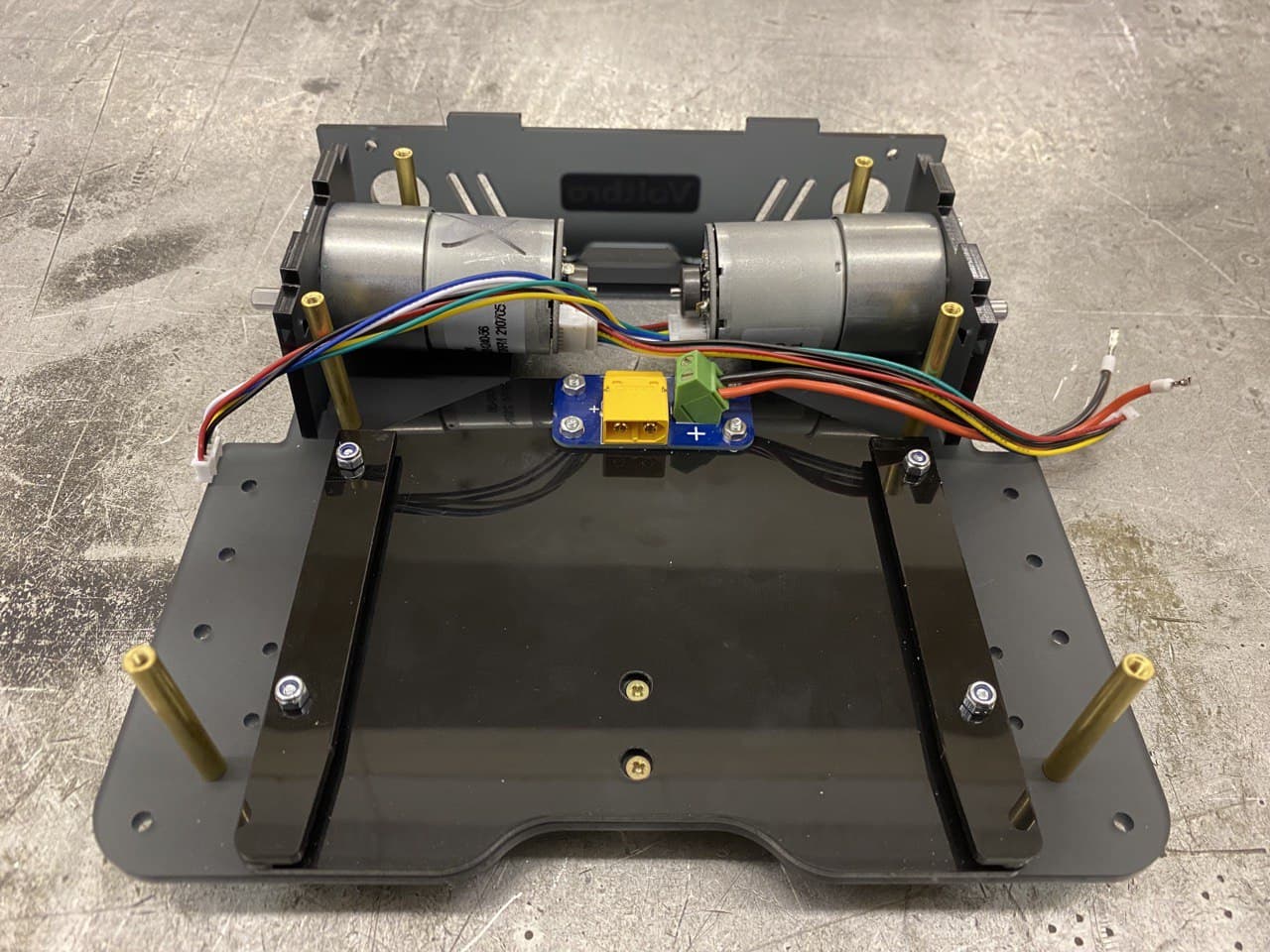
Обратите внимание, при монтаже кронштейна крепления левого мотора "направляющий треугольник" на кронштейне должен находиться в правом верхнем углу, а для кронштейна крепления правого мотора "направляющий треугольник" должен находиться в левом верхнем углу, как показано на рисунке:
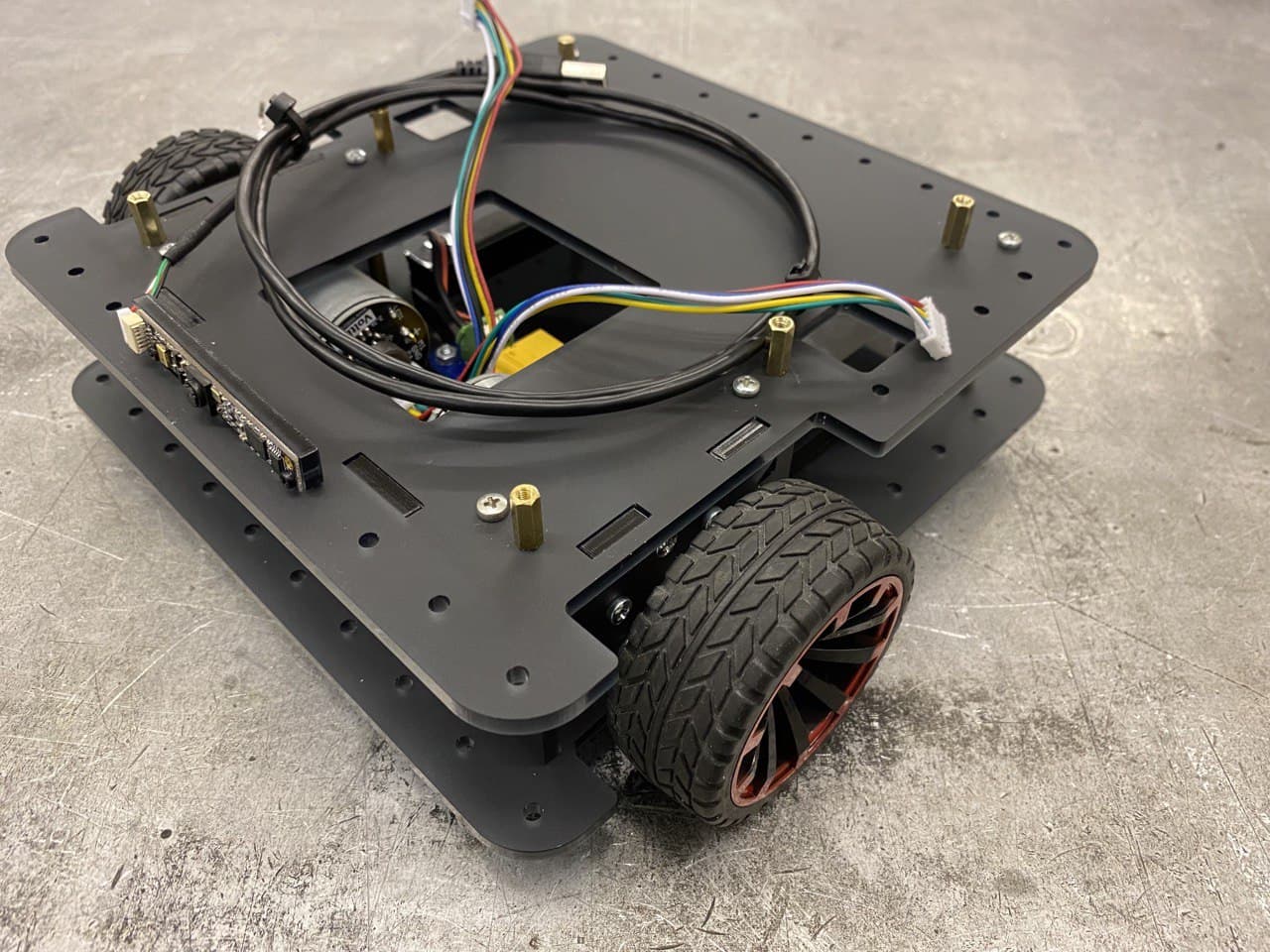
- Установить верхнюю часть колесной базы и прикрутить её к монтажным стойками используя 6 винтов М3х8
- На вал мотора установить муфту для крепления колес и колесо, используя 3 винта М4х8
- Смонтировать плату Turtleboard на верхнюю часть колесной базы используя 6 винтов М3х8
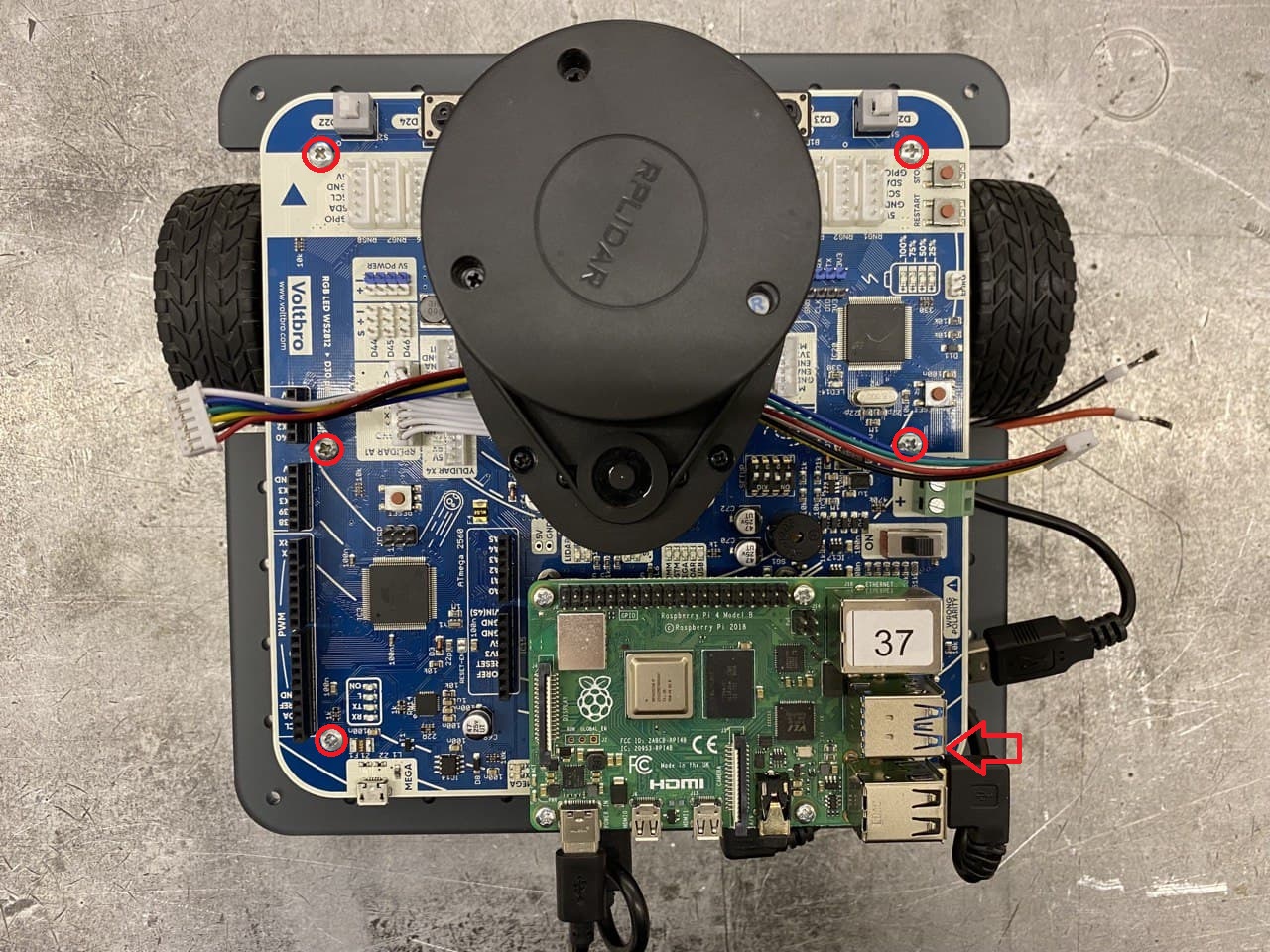
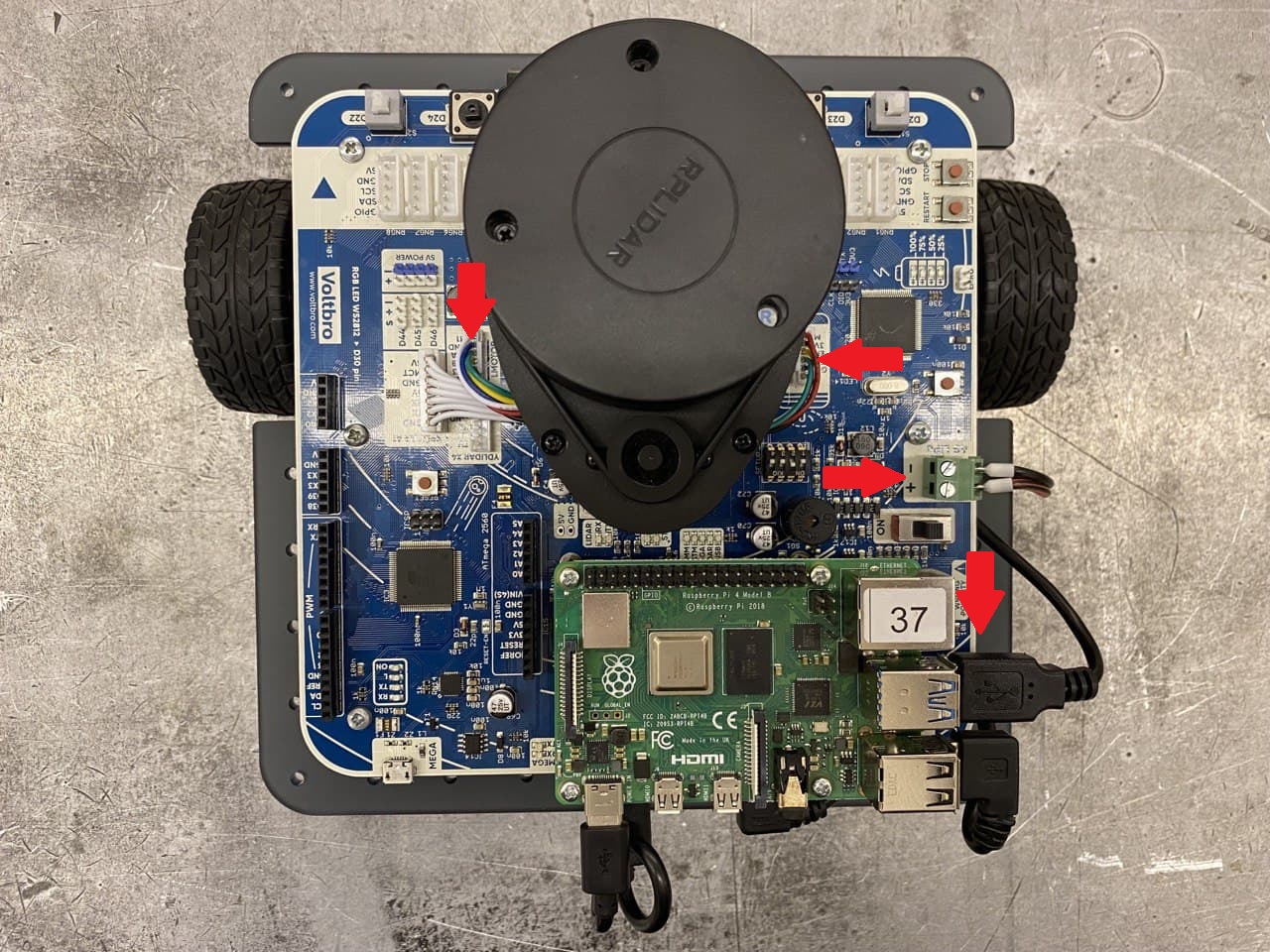
9. Подключить кабели моторов и провода питания от платы TurtleBoard, а также usb-кабель подключения камеры от Rasberry Pi
В случае, если после включения робота, моторы при тестировании проезда вперёд вращаются назад (и наоборот), необходимо проверить две вещи:
- Правильно ли вы подключили кабели подключения моторов (правый мотор к правому порту подключения, левый мотор к левому порту подключению);
- На DIP-переключателе, на плате TurtleBoard, переключатель № 2 должен быть установлен в положение ON